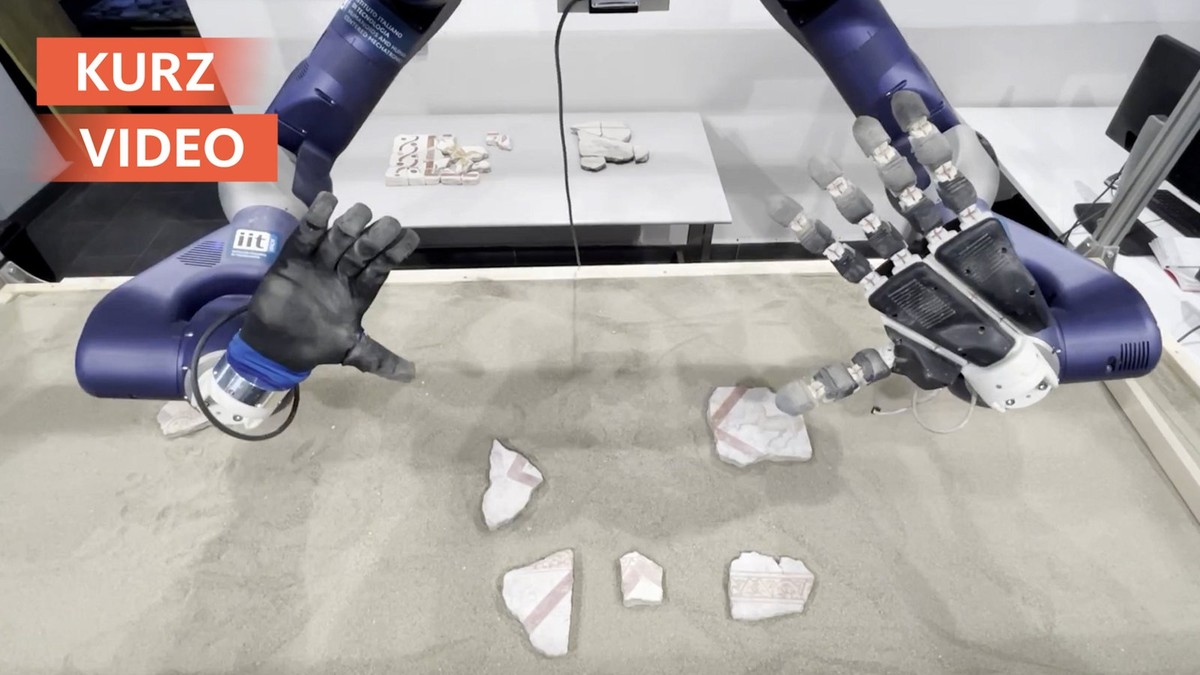
Een onderzoeksteam van de Universiteit Bonn heeft een robot ontwikkeld die in staat is om te puzzelen. Met zijn twee armen en zachte grijppoten plaatst de robot stukje voor stukje de fragmenten nauwkeurig op hun plaats. Om te bepalen welk fragment waar hoort, berekent een kunstmatige intelligentie (KI) vooraf de juiste positie. De stukjes zijn gedigitaliseerd met behulp van een speciaal ontwikkelde 3D-scanmethode.
Kunstmatige Intelligentie Samengevoegd met Robotica
Het project, dat wordt gefinancierd door de EU en wordt gecoördineerd door de Universiteit Ca’ Foscari in Venetië, verbindt moderne methoden van KI en robotica met de behoeften van de archeologie. Veel onderdelen zijn beschadigd of zelfs volledig verloren. Daarnaast kunnen fragmenten van verschillende werken door elkaar heen zitten. “Daarom is het zo belangrijk dat robotica en KI nauw samenwerken met archeologisch deskundigheid,” legt Maren Bennewitz uit.
Algoritmen Berekenen Voor de Robot
Nadat de fragmenten zijn gescand, doet de KI voorstellen voor passende combinaties en berekent het hoe uit honderden of duizenden delen weer grotere beeldsegmenten kunnen ontstaan. Doctorandus Nils Dengler zegt: “Onze algoritmen berekenen voor de twee robotarmen de bewegingen waarmee de fragmenten betrouwbaar worden opgepakt en voorzichtig op de berekende positie worden geplaatst.” Voor het project heeft hij vijf weken in Pompeii doorgebracht.
Robotproject Bespaart Waardevolle Tijd
Het doel van het project is om archeologen te ontlasten. Volgens het onderzoeksteam vereist de reconstructie van gebroken vondsten veel geduld en blijft deze vaak jaren liggen in de dagelijkse musea-praktijk. Met het onderzoeksproject moet worden uitgevonden of robots het moeizame sorteer- en puzzelwerk kunnen overnemen, “zodat de deskundigen hun tijd kunnen besteden aan waar menselijke expertise onmisbaar is”, aldus Maren Bennewitz.





